搜索人机交互,纳米材料,集群机器人...
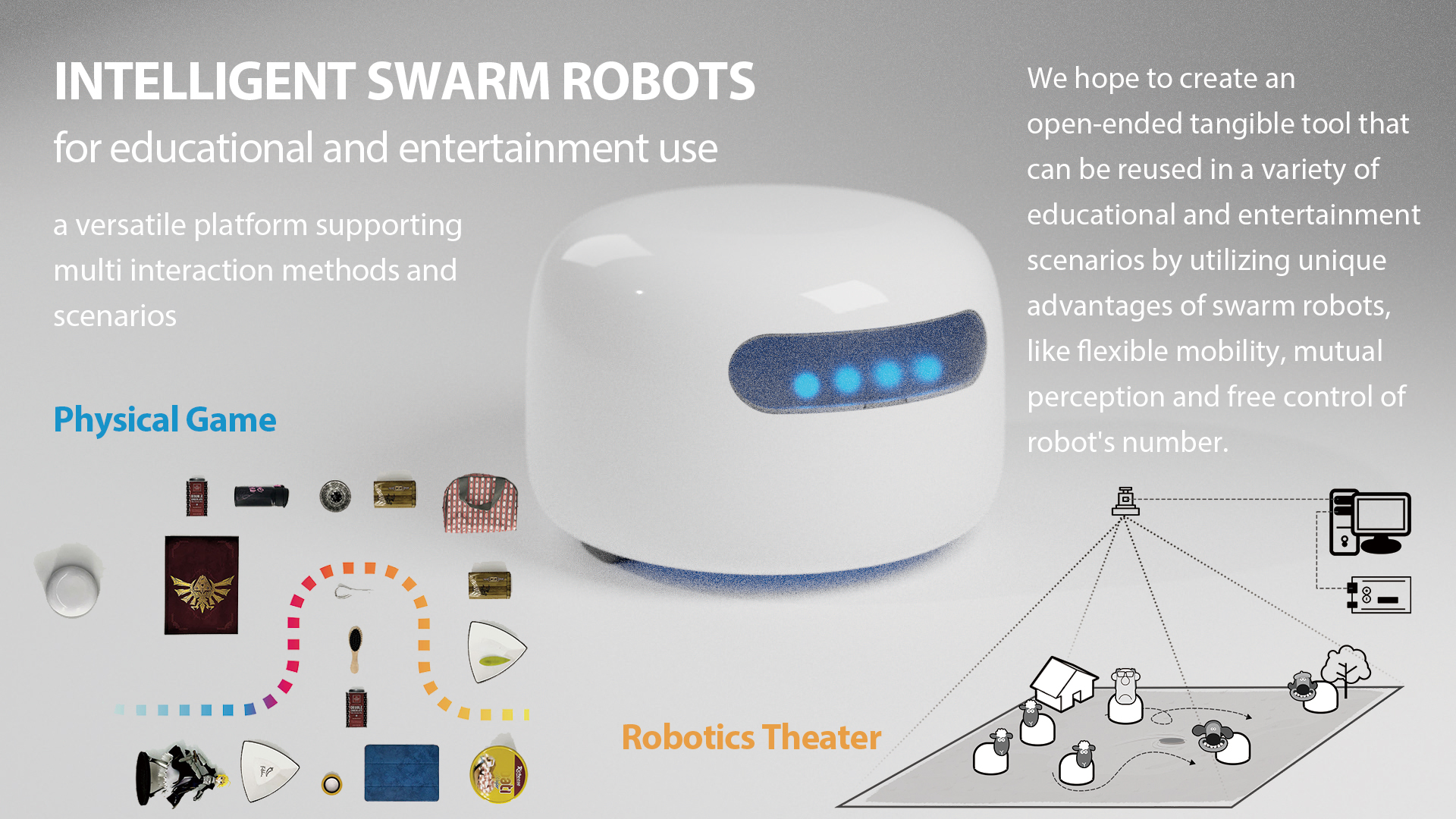
一种新型基于光学定位的小型集群机器人(Swarm Robotics)系统,它是一个具有多种交互方式方法的通用工具平台,并且脱离传统的投影定位方式,具有很强的可移植性。我们希望利用集群机器人灵活的移动性、个体相互感知能力、控件数量可自由定义等良好特性,创造一类能够在智慧家庭生活 中可重复使用的开放式实体交互工具。探究此类系统在教育和娱乐场景下的更多应用可能性,比如新型交互叙事工具、多移动控件的实体游戏等。集群用户界面相比于实体交互界面有更强的移动能力和更多可操纵的控件,在完成特定任务时能提供更强大、更低成本、更简单和可靠的平台。
项目进展
迭代开发了两版具有不同驱动方式的集群机器人,分别探索了在教育娱乐场景下,集群机器人的应用可能性,同时提出面向多机器人系统 的多人同步/异步交互方式。我们将继续研发可支持多应用扩展的通用集群机器人平台