Meng Wang, Yao Su, Hangxin Liu, Yingqing Xu. WalkingBot: Modular Interactive Legged Robot with Automated Structure Sensing and Motion Planning.The 29th IEEE International Symposium on Robot and Human Interactive Communication(RO-MAN’20).
Abstract
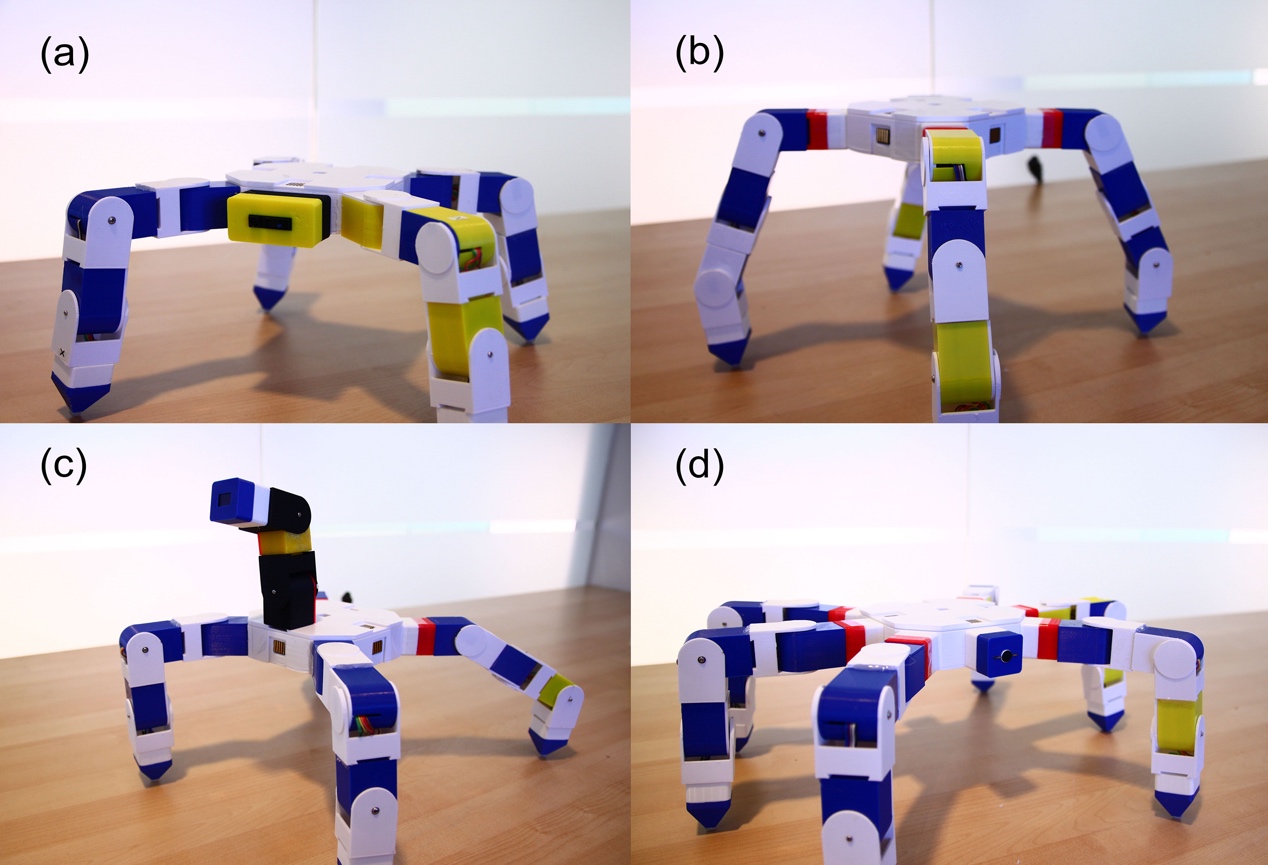
This paper proposes WalkingBot, a modular robot system that allows non-expert users to build a multi-legged robot in various morphologies. The system provides a set of building blocks with sensors and actuators embedded. Through the integrated hardware and software, the morphology of the built robot is interpreted automatically, and its kinematic model is reconstructed and displayed in a customized GUI in the computer screen, allowing users to easily observe, control, and program the robot. A Model Predictive Control (MPC) scheme is introduced to generate a control policy for various motions(e.g. moving front, back, left etc.) corresponding to the sensed robot structure, such that the robot can walk around right after assembled. Targeting different levels of programming skill, two programming methods—visual block programming and events programming are also presented to enable users to create their own interactive legged robot.

Download PDF:
