
ACM CHI 2026 将于2026年4月13日在西班牙巴塞罗那召开,清华大学未来实验室及其合作伙伴共有 26 项研究成果将在会议上发表,包含14篇长文、12篇短文,其中1篇获得Best Paper Award。
此次发表的论文聚焦智能人机交互,涵盖触觉与物理交互、虚拟与混合现实、生成式 AI 与用户体验、情境感知与系统设计等前沿方向。
ACM CHI 2026 will take place in Barcelona, Spain, on April 13, 2026. A total of 26 research contributions from The Future Laboratory, Tsinghua University, and its collaborators will be presented at the conference, including 14 full papers and 12 posters — one of which has received a Best Paper Award.
The accepted papers and posters focus on intelligent human-computer interaction, covering cutting-edge directions such as haptic and physical interaction, virtual and mixed reality, generative AI and user experience, as well as context-aware computing and system design.
01. 面向长期情绪调节的设计:一款用于强制隔离戒毒女性的呼吸生物反馈游戏【Best Paper Award】
Designing for Long-Term Emotion Regulation: A Breathing Biofeedback Game for Women in Compulsory Isolation Drug Rehabilitation Centers【Best Paper Award】
作者:陈琦,杜佳琛,姚智皓,李德强,程瑜,刘浩然,郭轶捷,杨彦之,陈葸静,米海鹏

在女性戒毒康复过程中,情绪调节困难是导致复吸的重要风险因素。与此同时,羞耻感、低自尊以及认知功能受损等问题,也进一步削弱了她们学习并持续运用情绪调节技能的能力。针对封闭环境中相关人群长期技能迁移研究相对不足的问题,我们设计并评估了一款基于低成本音频输入的七天阶段式呼吸生物反馈游戏。该游戏旨在支持情绪调节技能的习得与迁移,增强个体的自我效能感与自我接纳水平,并促进持续注意和长期参与。
在一项为期六周、共有60名参与者参与的对照研究中,结果表明,该游戏不仅保持了较高水平的参与度,还有效提升了参与者的呼吸技能,促进了相关技能向日常生活中的迁移,并缓解了负性情绪。最后,我们基于研究发现总结了五项设计启示。
02. VR Calm Plus:将可挤压的有型交互设备与沉浸式虚拟现实相结合以调节情感压力
VR Calm Plus: Coupling a Squeezable Tangible Interaction with Immersive VR for Stress Regulation
关键词:
虚拟现实,情绪压力管理,原型系统,挤压式交互,触觉
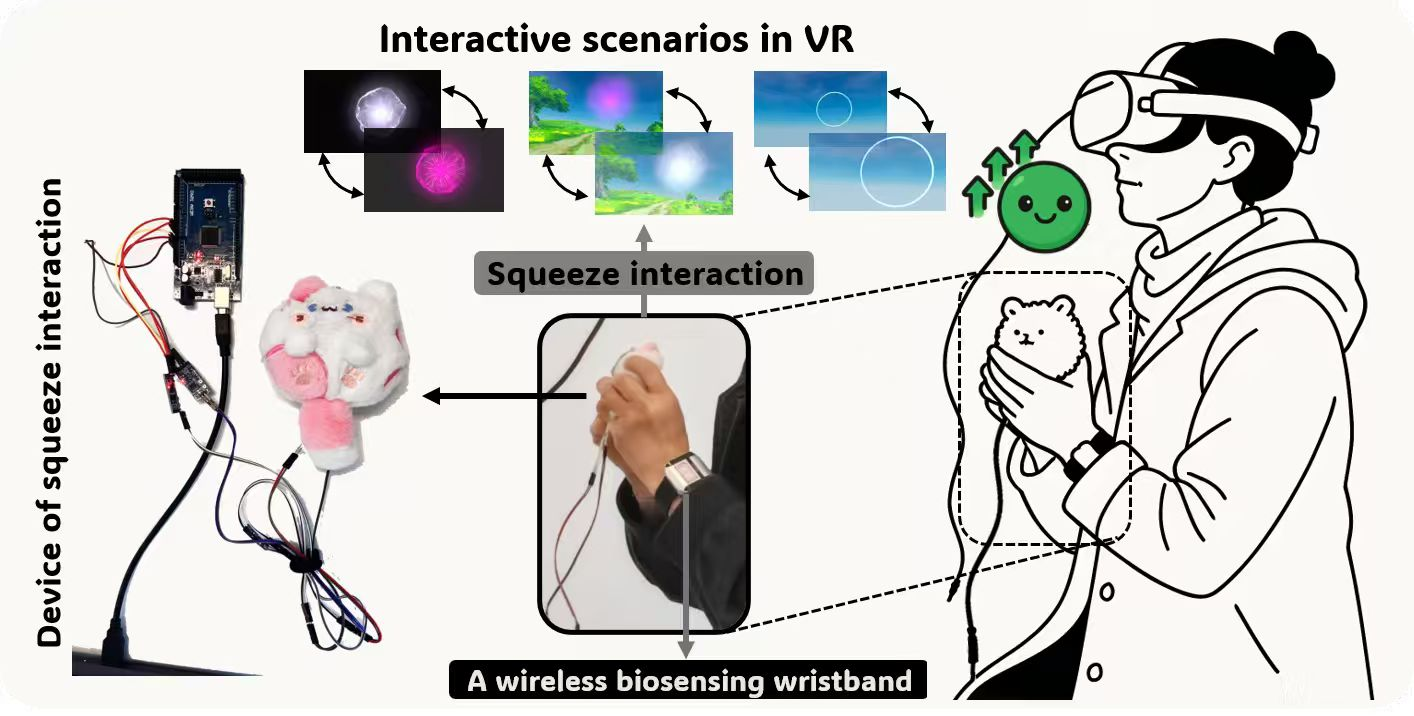
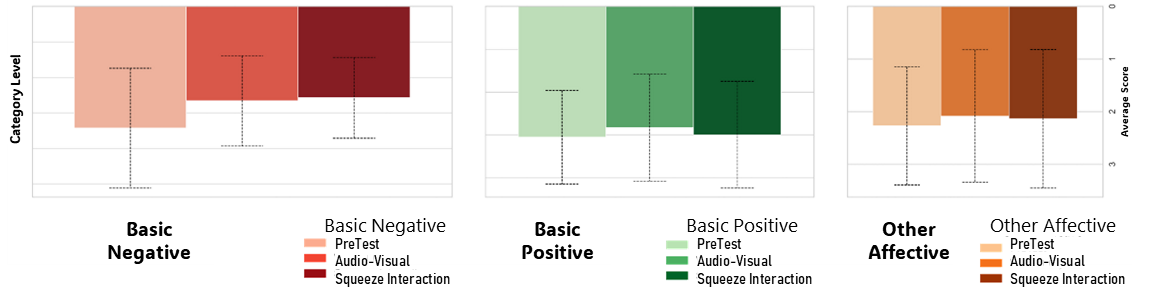
为了弥补当前虚拟现实(VR)在压力管理中过度依赖视听刺激的空白,本文介绍了“VR Calm Plus”系统,一个将压力感应毛绒玩具与交互式 VR 环境深度融合的多模态系统。该系统突破了传统单向刺激的局限,允许用户通过物理挤压动作实时、动态地调节虚拟氛围,从而在具身交互中培养更深层次的放松感 。通过结合 PANAS-X 量表、主观体验问卷、多维生理指标(心率、皮肤电导、脉搏率变异性)以及半结构化访谈,本文对 40 名参与者进行了系统评估 。结果表明,与仅有视听体验的基线相比,基于挤压的实体交互显著增强了用户的积极情绪与主观放松感 。此外,生理数据揭示了一种独特的“主动放松”状态:即在心率大幅降低的同时,依然维持了自主神经系统的灵活性,并伴随持续的高情感投入 。该研究进一步拓展了情感计算的应用边界,将实体触觉输入转化为关键的“隐性交互通道”与“情感放大器” 。这种实体动作与沉浸式环境的深度耦合,不仅验证了具身干预在支持情感健康中的核心价值 ,更从情感计算的视角,为未来开发具备“情感-触觉双向对齐(Bi-directional Emotion-Haptic Alignment)”与闭环生理调节能力的智能 VR 心理干预工具提供了开创性的设计范式 。
While Virtual Reality (VR) is increasingly employed for stress management, most applications rely heavily on audio-visual stimuli and overlook the therapeutic potential of squeezing engagement. To address this gap, we introduce VR Calm Plus, a multimodal system that integrates a pressure-sensitive plush toy into an interactive VR environment. This interface allows users to dynamically modulate the virtual atmosphere through physical squeezing actions, fostering a deeper sense of embodied relaxation. We evaluated the system with 40 participants using PANAS-X surveys, subjective questionnaires, physiological measures (heart rate, skin conductance, pulse rate variability), and semi-structured interviews. Results demonstrate that, compared to a visual-only baseline, squeeze-based interaction significantly enhances positive affect and perceived relaxation. Physiological data further revealed a state of “active relaxation”, characterized by greater reductions in heart rate and preserved autonomic flexibility (PRV), alongside sustained emotional engagement (GSR). Our findings highlight the value of coupling tangible input with immersive environments to support emotional well-being and offer design insights for future VR-based mental health tools.
03. VisGuardian:一种轻量级的家庭环境智能眼镜视觉隐私控制技术
VisGuardian: A Lightweight Group - based Visual Privacy Control Technique For Smart Glasses in Home Environments
作者:张书宁,臧渠成,胡永泉,杜佳琛,王雪扬,孔彦,付心仪,Suranga Nanayakkara,易鑫*,李贺武
关键词:
隐私保护,细粒度权限,权限控制,AR眼镜,智能眼镜
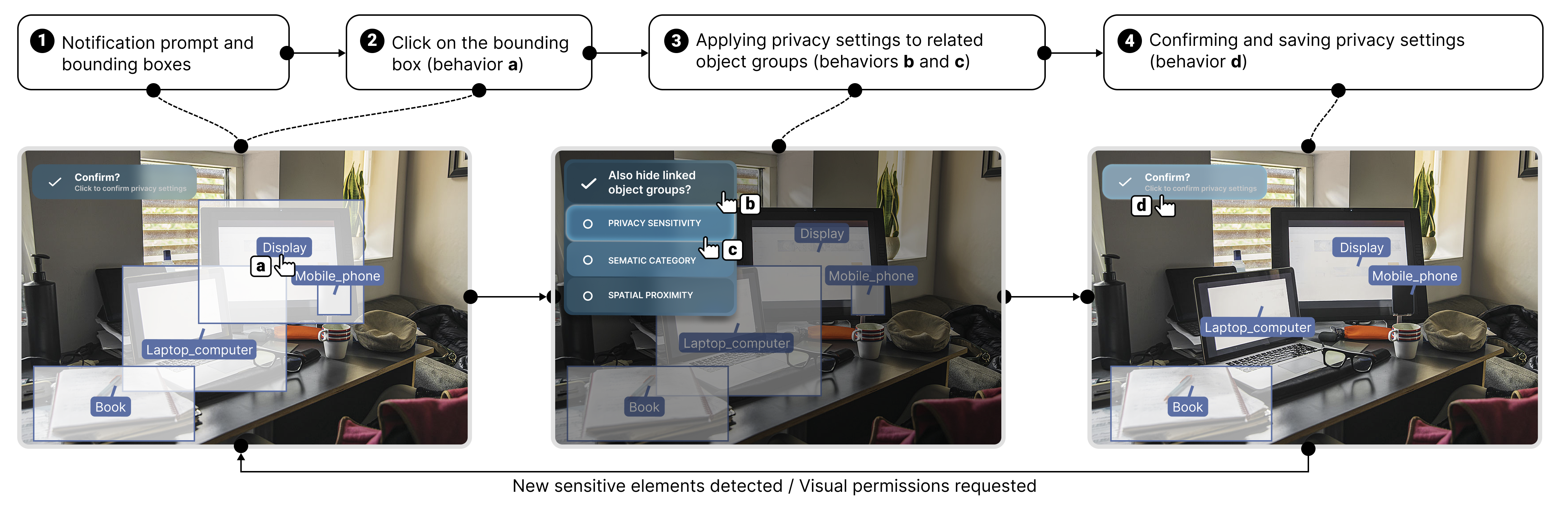
AR 眼镜上 AI 应用的“全时感知”特性,使得传统的隐私授权方式在家庭环境中处理特定场景的私密视觉数据时显得效率低下。由于存在大量敏感物品以及日常生活行为的私密性,家庭环境对隐私保护提出了巨大挑战。为此,本文提出了 VisGuardian,,一种针对 AR 眼镜的、基于内容的细粒度视觉授权技术。VisGuardian 通过基于分组的控制机制,让用户能够高效地管理多个隐私物品的权限。VisGuardian 利用 YOLO 模型进行物体检测,并采用预定义分类对物体进行分组。用户只需选中一个物体,即可根据隐私敏感度、物体类别或空间距离等标准,对相关联的一组物体进行遮盖处理。技术评估显示,VisGuardian 的 mAP50(平均精度)达到 0.6704,延迟仅为 14.0 毫秒,每小时电池消耗仅增加 1.7%。此外,一项用户研究(N=24)将 VisGuardian 与传统的滑块式及单物体授权方式进行了对比,结果表明 VisGuardian 在设置权限的速度上明显更快,并因其高效、有效和易用的特点而更受用户青睐。
Always-on sensing of AI applications on AR glasses makes traditional permission techniques ill-suited for context-dependent visual data, especially within home environments. The home presents a highly challenging privacy context due to the high density of sensitive objects, and the frequent presence of non-consenting family members, and the intimate nature of daily routines, making it a critical focus area for scalable privacy control mechanisms. Existing fine-grained controls, while offering nuanced choices, are inefficient for managing multiple private objects. We propose VisGuardian, a fine-grained content-based visual permission technique for AR glasses. VisGuardian features a group-based control mechanism that enables users to efficiently manage permissions for multiple private objects. VisGuardian detects objects using YOLO and adopts a pre-classified schema to group them. By selecting a single object, users can efficiently obscure groups of related objects based on criteria including privacy sensitivity, object category, or spatial proximity. A technical evaluation shows VisGuardian achieves mAP50 of 0.6704 with only 14.0 ms latency and a 1.7% increase in battery consumption per hour. Furthermore, a user study (N=24) comparing VisGuardian to slider-based and object-based baselines found it to be significantly faster for setting permissions and was preferred by users for its efficiency, effectiveness, and ease of use.
04. Roomify:面向沉浸式虚拟环境的空间对齐风格生成
Roomify: Spatially-Grounded Style Transformation for Immersive Virtual Environments
作者:王雪扬,岑沁璇,毕玮韬,马云翔,易鑫*,Robert Xiao,付心仪,李贺武
关键词:
交叉现实,混合现实,生成式AI,风格转换,沉浸式体验
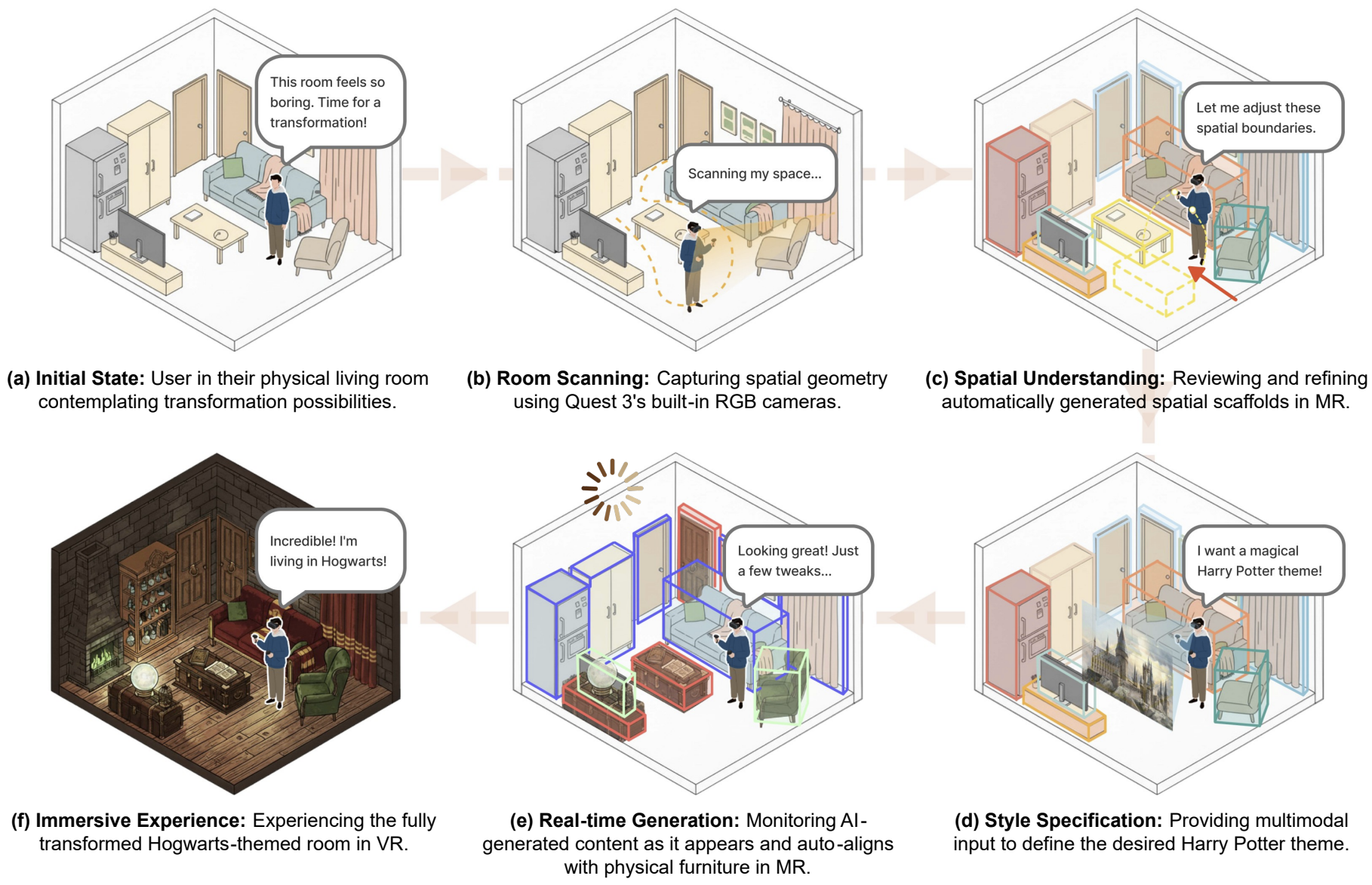
当前的虚拟现实(VR)技术存在一个根本性矛盾:完全沉浸会牺牲对物理环境的感知,而透视(Passthrough)方案又会破坏沉浸感。针对这一问题,本文提出 Roomify,这是一种全新的混合现实(MR)系统,能够将用户的真实物理房间转换为主题化虚拟环境,同时保留空间感知能力与功能可用性。 Roomify 通过语义保留式转换解决了这一问题 —— 将物理空间视为 “语义容器”,在保持家具功能与空间布局不变的前提下,实现大幅度的风格化改造。Roomify系统流程结合了原位三维场景理解、AI 驱动的语义分解与风格感知式生成,能够基于物理现实创建个性化虚拟环境。我们还介绍了一款跨现实创作工具,支持通过混合现实编辑与虚拟现实预览进行精细化调整。两项用户研究验证了的有效性:一项针对 18 名 VR 用户的实验表明,与基线方案相比,Roomify在安全性与沉浸感上均有提升;另一项针对 8 名创意工作者的研究证实,Roomify可在多样场景中提供丰富的创意表达能力。借助 Roomify,用户既能置身奇幻世界(从水下王国到太空飞船),又能在熟悉的物理空间中安全行动。
We present Roomify, a spatially-grounded transformation system that generates themed virtual environments anchored to users’ physical rooms while maintaining spatial structure and functional semantics. Current VR approaches face a fundamental trade-off: full immersion sacrifices spatial awareness, while passthrough solutions break presence. Roomify addresses this through spatially-grounded transformation—treating physical spaces as “spatial containers” that preserve key functional and geometric properties of furniture while enabling radical stylistic changes. Our pipeline combines in-situ 3D scene understanding, AI-driven spatial reasoning, and style-aware generation to create personalized virtual environments grounded in physical reality. We introduce a cross-reality authoring tool enabling fine-grained user control through MR editing and VR preview workflows. Two user studies validate our approach: one with 18 VR users demonstrates a 63% improvement in presence over passthrough and 26% over fully virtual baselines while maintaining spatial awareness; another with 8 design professionals confirms the system’s creative expressiveness (scene quality: 5.95/7; creativity support: 6.08/7) and professional workflow value across diverse environments.
05. 言出法随:基于共语手势的虚拟现实三维道具生成方法
GestuProp: 3D Virtual Reality Prop Generation with Co-Speech Gestures
作者:姚智皓,姚郗文,熊昊微,冯元凌,孙启瑞,郭轶捷,米海鹏
本研究提出 GestuProp,一种基于共语手势(co-speech gestures)的虚拟现实(VR)道具生成系统。该系统通过结合语音与自然手势输入,使用户能够在VR环境中快速生成和调整三维道具。我们开发并实现了原型系统,并通过用户实验对其可用性与用户体验进行了评估。研究结果表明,GestuProp具有良好的可用性和积极的用户体验,同时也揭示了不同物体类别对手势使用方式与交互策略的影响。研究结果表明,语音与手势的协同交互机制能够有效支持VR中的三维道具生成任务,并为基于自然交互的VR内容创作工具设计提供了新的思路。
06. 基于拆解视频生成的 AI 增强现实重组指导:支持日常维修的脚手架设计
AI-generated AR Reassembly Guidance from Disassembly Videos to Scaffold Everyday Repair
作者:邓文静,姚智皓,康新慧,孙启瑞,吴欣桐,何思思,相宸卓,米海鹏
本研究提出了 RePairAR,探索如何利用多模态大语言模型,将拆解视频转化为可在增强现实(AR)中呈现的重装配指导,从而在不依赖特定产品说明书或 3D 模型的情况下,生成可用的AR维修指南。其核心目标是为用户提供可理解、可跟随的支持,降低日常家电维修的进入门槛。另外,RePairAR 体现了维修知识生成方式的改变,把原本较为封闭的、主要掌握在厂商或专家手中的维修知识重新组织为用户可以基于自身操作过程来生成、调用和掌握的实践资源。本研究希望以此推动更多关于“日常维修、延长产品使用寿命”的讨论,并支持更可持续的使用与消费行为。
07. 让结构呼吸:FDM打印与气动驱动的协同融合,实现形变界面
DuoMorph: Synergistic Integration of FDM Printing and Pneumatic Actuation for Shape-Changing Interfaces
作者:李雪晴,黄丹琪,于天宇,尹淑梓,高冰洁,Anna Matsumoto,姚智皓,赵一玮,吕时清,田宇宸,Lining Yao,米海鹏,卢秋宇
关键词:
形变界面,数字制造,气动界面,FDM打印,4D打印
该研究提出了 DuoMorph——一种将 FDM(熔融沉积成型)打印与气动驱动协同融合的设计与一体化制造方法,用于创造新型形变交互界面。
与以往研究将气袋与打印结构分步制作再拼接不同,DuoMorph 中的打印结构与热封气动元件相互设计、相互配合:打印结构既可被气袋驱动而运动,也可约束气袋的形变方式;同时,整个混合结构可仅用一台标准 FDM 打印机通过单一连续流程完成制造,涵盖热封与 3D/4D 打印两种形式,大幅降低人工成本,并提升制造精度与一致性。
研究定义了一个四维设计空间,涵盖打印结构与气动元件相互作用的四种基础设计空间。并提供了配套的设计工具,可自动生成 G-code;并通过动态植物雕塑、仿生夹持器、定制按摩颈枕、刺猬桌面玩具等四组应用示例展示了 DuoMorph 的创作潜力。系统性粘附强度测试与 4D 打印弯曲实验则进一步验证了该方法的可靠性与可复现性。
08. 购物搭子:促进直播电商中理性消费的有效 AI 干预方法
BuyMate: Making AI Interventions Effective in Promoting Rational Consumption in Live Commerce
作者:王诗溢,刘奕杉,朱志杭,刘谨滔,马雪瑞,关昕,冯天阳,赵晴飞,张心智,姚远,米海鹏
直播电商依托算法推荐、限时促销等机制催生大量冲动消费,既损害消费者财务福祉,也加剧过度消费的社会问题,而现有研究尚未针对该场景构建适配的理性消费支持体系。本研究以人机交互为视角,融合消费心理学与人工智能技术,通过问卷调研、半结构化访谈和协同设计工坊,揭示直播消费冲动的动机 - 能力 - 触发三维驱动机制,明确用户对 AI 干预 “赋能而非替代” 的核心需求。
基于此,设计并实现多模态 AI 理性消费支持系统 BuyMate,搭载同类产品对比、销售话术识别与重构两大核心模块,以轻量、可控的文本 / 语音形式提供实时中立的决策支持。通过对受试者的混合方法用户评估,验证了 BuyMate 能显著减少冲动购买行为、提升消费者决策自主性,且可培养用户对营销诱导的识别能力,推动消费行为向可持续转变。
研究提出兼顾情感体验与理性干预、设计可控界面增强用户信任的设计策略,为直播电商领域负责任 AI 的设计与落地提供了理论框架和实践参考,拓展了人机交互在消费领域的研究边界,也为构建健康的直播电商消费生态提供了技术路径。
09. MojiKit:数据驱动的动物启发型机器人情感互动 DIY 工具包
From Pets to Robots: MojiKit as a Data-Informed Toolkit for Affective HRI Design
作者:何丽雯,陈娉婷,唐自衡,刘翼逍,Jihong Jeung,韩腾,佟馨*
关键词:
人机交互,情感交互,宠物启发式机器人,动物形态机器人
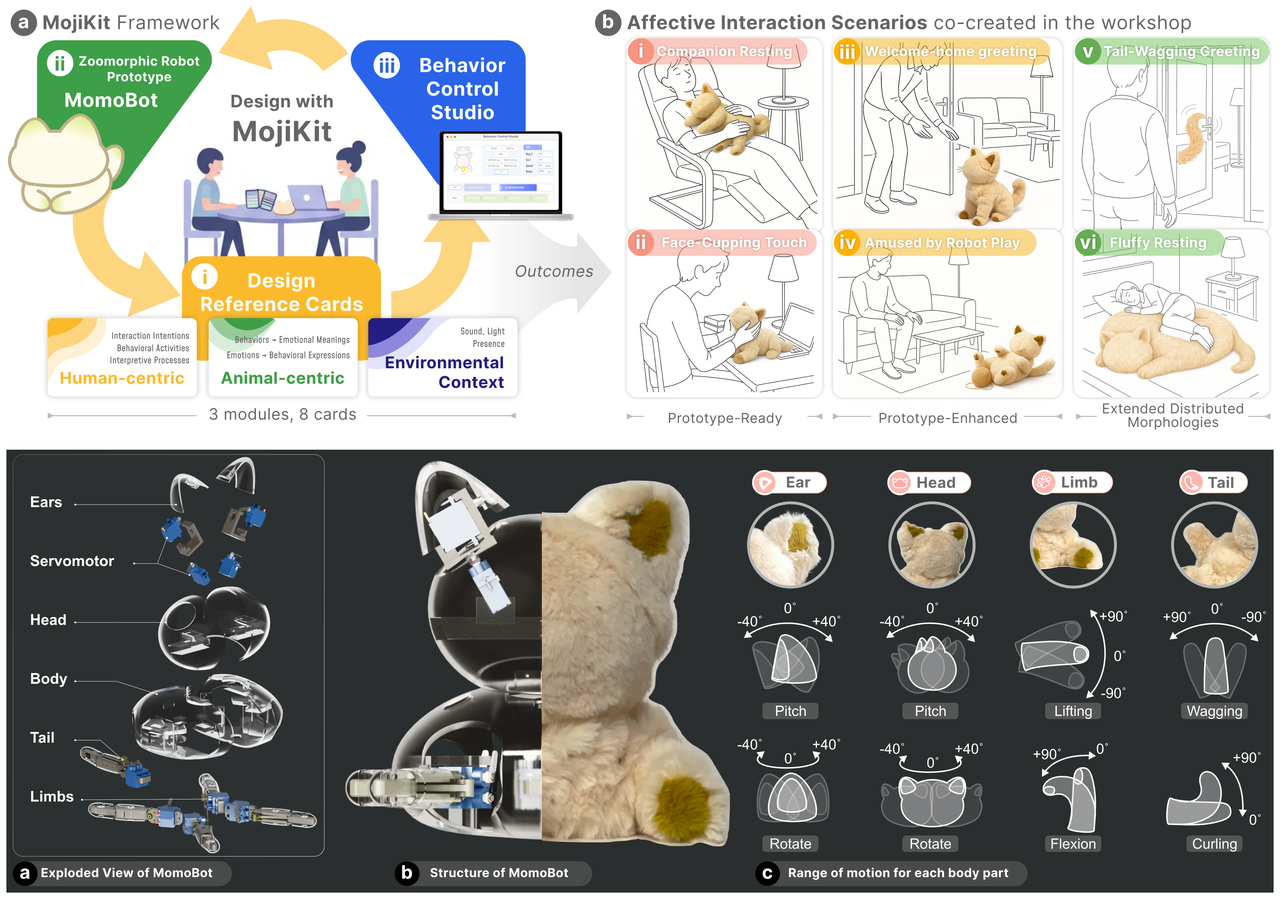
本研究提出了一种基于真实人宠互动数据的情感机器人设计方法,并开发了MojiKit工具包,将互动模式转化为可供设计实践应用的资源。与以往侧重形态模仿的路径不同,研究聚焦于人类如何解读动物行为并构建情感意义。通过工作坊分析,揭示了关键设计洞见:情感的核心在于动作发生的节奏、空间与关系语境;设计需在真实感与可读性间权衡,情感表达本质上是可解释性问题;动物的特征可拆解为部分形态与节律线索,嵌入日常物件以拓展设计边界;情感互动常被视为关系状态的维系过程,而非孤立表达。方法论上,MojiKit提供了一条数据驱动、面向实践的路径,将分散经验结构化,降低设计门槛,避免将动物启发简化为表层拟态,实现了动物启发式交互在分析与实践层面的系统化表达与复用。(论文获取地址:https://arxiv.org/abs/2603.11632)
This work proposes a data-informed approach to affective robot design grounded in real-world human–pet interactions, and introduces MojiKit, a toolkit that translates interaction patterns into resources for design practice. Rather than focusing on morphological mimicry, the work examines how humans interpret animal behavior to construct emotional meaning. Workshop findings highlight that affect is shaped by movement timing, spatial configuration, and relational context; that design involves balancing realism and legibility as an issue of interpretability; and that animal characteristics can be decomposed into partial morphologies and rhythmic cues embedded in everyday artifacts. Affective interaction is further understood as the maintenance of relational states rather than isolated expressions. MojiKit structures fragmented experiential knowledge into reusable resources, offering a practice-oriented, data-informed pathway for affective HRI design beyond superficial mimicry.
Speculating with Older Adults in HCI: A Scoping Review
作者:翟羽翔, Chris Elsden, 陈鹿华, Jihong Jeung, John Vines
关键词:
思辨设计,老年人,思辨方法,共同思辨,范围综述
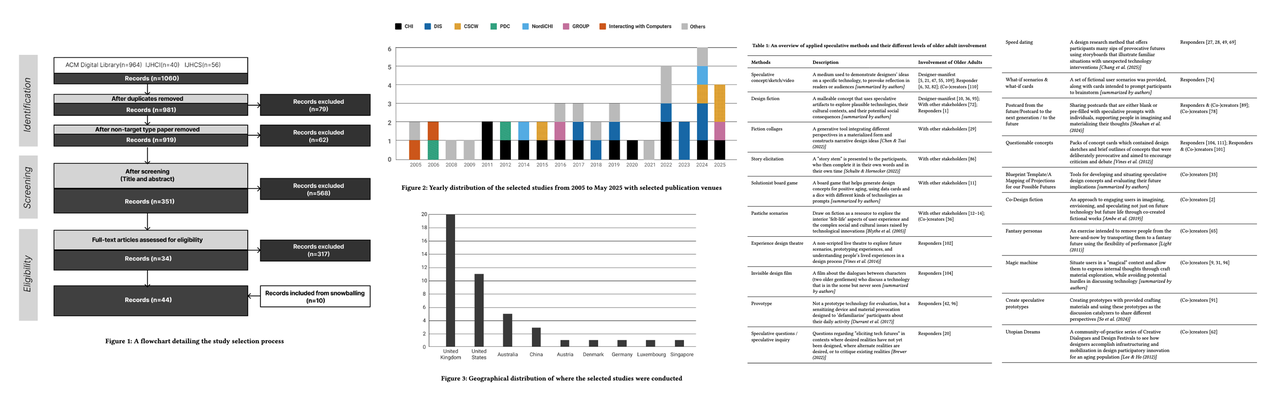
老年人正越来越多地被邀请参与人机交互领域中的思辨性设计活动,但关于研究者如何促进这些过程,以及这一群体如何参与到塑造替代性的当下以及社会—技术的未来中,目前仍缺乏系统性的认识。尽管思辨设计方法通常旨在支持非设计背景的参与者参与设计过程,但在与老年人合作时却面临一些独特挑战,使其参与过程变得更加复杂。为建立更为全面的理解,我们对44项涉及老年人参与式思辨设计的既有研究进行了范围综述,重点分析其研究目标与方法论动机、促进方式,以及老年人如何参与思辨活动。通过这一分析,我们识别出持续存在的方法论张力,指出在与老龄群体开展更具包容性的思辨实践方面的潜在机遇,并提出了对未来设计实践的启示。
Older adults are increasingly invited into speculative activities within HCI, yet little is known about how researchers facilitate these processes or how this population engages in shaping alternative presents and socio-technical futures. While speculative design methods often aim to support non-designers to contribute to design processes, engaging older adults poses unique challenges that complicate their involvement. To build a comprehensive understanding, we conducted a scoping review of 44 prior studies on speculative design involving older adults, focusing on the research objectives and methodological rationales, facilitation, and how older adults engage in speculation. Through this analysis, we identify persistent methodological tensions, opportunities to advance more inclusive speculative practices with aging populations, and suggest implications for future practice.
11. 关注“关怀”:人机交互领域关怀研究的元叙事综述
Caring about Care: A Meta-Narrative Review of HCI Research on Care
作者:王子璇, 郭元蓉, Eilidh Bowman, 翟羽翔, 舒欣欢, 张绳宸, Karey Helms, Tara Capel, John Vines
关键词:
关怀,文献综述,女性主义关怀伦理学,关怀羁绊
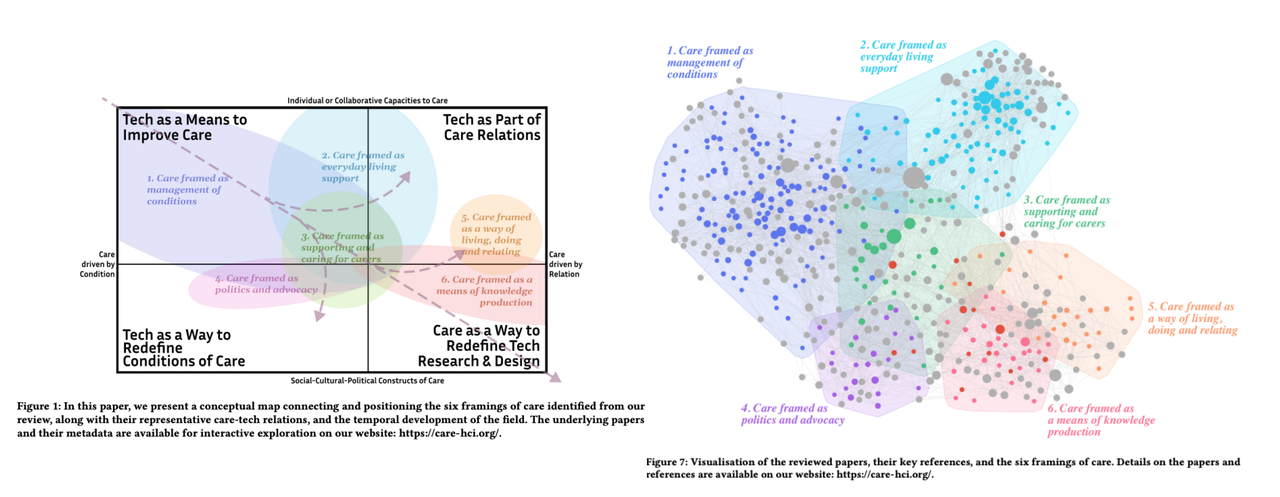
近年来,人机交互领域中关于关怀(Care)的研究论文数量迅速增长。尽管学界对“关怀”既作为技术应用领域、又作为研究与设计中的伦理立场的关注不断增强,但对这一概念的整体性理解仍然有限。不同关怀应用领域之间如何相互关联,其背后的基本假设在多大程度上是一致或存在张力,以及这些研究如何共同塑造人机交互领域关于关怀的学术话语,尚未得到清晰阐释。为此,本文对317篇SIGCHI会议中与关怀相关的论文开展了元叙事综述。首先,梳理了HCI领域中关怀研究的整体图景;其次,提出了六种典型的关怀理解框架,并构建了一个概念图谱,以呈现这些框架之间和其所体现的“关怀—技术”关系,以及该领域的时间演进脉络。最后,文章讨论了该综述对于人机交互研究的启示,并指出当前研究的不足与未来方向。
(网站:https://care-hci.org/)
The number of HCI papers on care has grown rapidly in recent years. Despite growing interest in care both as an application domain for technology and as an ethical stance in research and design, our integrated understanding of the concept is limited. It remains unclear how various application areas of care relate to one another, to what extent their underlying assumptions align or contradict, and how they collectively shape HCI discourse on care. To address this, we present a meta-narrative review of 317 SIGCHI papers on care. We first outline the landscape of care in HCI. We then present six paradigmatic framings of care, and a conceptual map that positions these framings in relation to each other, their representative care–tech relations, and the temporal development of the field. We conclude by discussing the implications from the review, as well as gaps in the field and future directions.
12. BernO: 一种用于VR空间嗅觉交互的呼吸驱动气味渲染装置
BernO: A Breath-Driven Odor Display for Spatial Olfactory Interaction in VR
作者:张煜,李致宏,蔡静桐,侯雅庆,郑思琪,徐千尧,路奇
关键词:
气味渲染, 空间嗅觉交互, 呼吸驱动

这篇论文介绍了一种为虚拟现实量身打造的新型气味交互装置。它的独特之处在于,无需借助风扇或喷雾,而是利用使用者自然的呼吸气流,从装置内置的微型气味仓中带出气味分子,并将其同步送入鼻腔。这种呼吸驱动的设计不仅实现了气味的即吸即得和浓度的快速调节,还从根本上避免了传统设备带来的额外风感、湿气等干扰,让虚拟世界的嗅觉体验更加纯粹、真实且具有空间方位感。
We present a breath-driven odor display device that enables spatial odor perception in virtual reality, relying on users’ natural inhalation rather than pumps or fans. The device supports rapid concentration adjustment through two models: a continuous gradient (monotonic concentration change with position) and a plume (intermittent, fluctuating patterns resembling natural dispersal). To explore its potential, we conducted a proof of concept evaluation across four tasks: concentration discrimination, direction and distance localization, and integrated position searching. Results show that the device can dynamically modulate odor concentration for spatial olfactory perception. Our findings further reveal complementary strengths and limitations of the two models—gradients support stable, precise cues, whereas plumes better emulate natural variability. This work introduces a simple yet effective method for simulating spatial odor experiences in VR, offering a lightweight, energy-efficient pathway that expands the design space for olfactory interaction research in virtual environments.
13. AI for Creativity: A GenAI-Based Approach for Early Concept Design and Its Impact on Senior Architects
作者:Jiajuan Li, Xia Wang, Chengzhong Liu, Yaxin Chen, Le Fang, Yingqing Xu, Lie Zhang, Kun-Pyo Lee, Stephen Jia Wang
关键词:
Generative AI, Senior Architects, Early Design Stages,
Human-AI Collaboration, Creativity Support
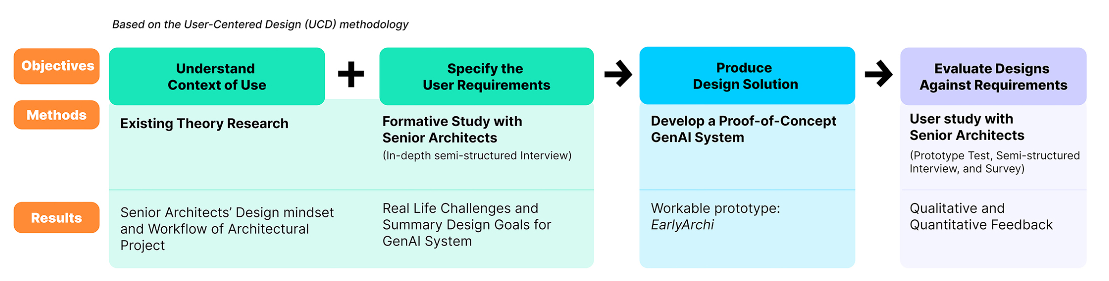
Senior architects are pivotal in shaping architectural projects, yet integrating Generative AI (GenAI) into their workflows presents notable challenges. A formative study (N=11) identified key pain points in their early concept design process. To address these, we developed EarlyArchi, a GenAI-driven system supporting automated concept generation and evaluation. In a within-subject study (N=13), participants used EarlyArchi for early-stage design tasks. Results
showed enhanced perceived creativity, improved design competency, and more efficient ideation. However, concerns emerged regarding controllability and domain-specific accuracy, highlighting the need for features that preserve professional autonomy and trust.
Further analysis revealed three GenAI involvement modes—fully AI-driven, GenAI-led, and human-led—emphasizing the importance of adaptive role allocation in balancing creative exploration with expert leadership. These findings offer insights into supporting senior architects through GenAI while identifying key considerations for designing future human–AI co-creation systems.
14. More Than a Dictionary: How AI Scaffolds the Journey from Digital Outsider to Insider
作者:Yao Xiao, Qi Xin, Angela Chulei Tang, Zhihao Yao, Shujie Yang, Zhigang Wang*
关键词:
Chain of Thought, Retrieval-Augmented Generation,
Symbolic reasoning, Large Language Model
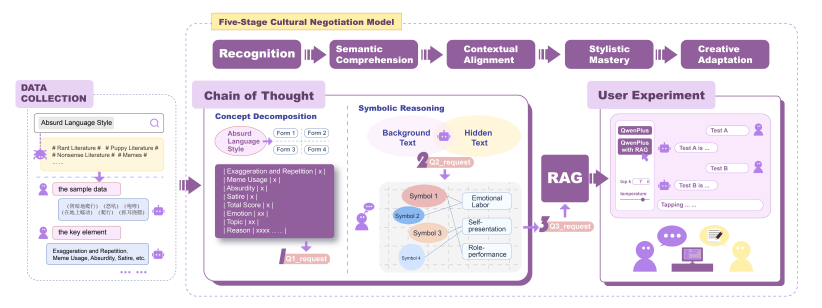
Online communities often develop shared symbolic vocabularies that strengthen insider bonds but implicitly marginalize newcomers. On Chinese platforms, this dynamic is exemplified by “absurd language,” a style distinguished by irony, exaggeration, and local memes. While this form of expression fosters in-group intimacy, it creates significant cultural barriers for “Sino-digital non-natives.” This study investigates how AI can mediate cultural integration beyond mere translation. We developed an AI mediator integrating Chain-of-Thought (CoT) and Retrieval-Augmented Generation (RAG) to scaffold this journey. A mixed-methods evaluation (N=14) demonstrates significant improvements in comprehension accuracy over a baseline LLM. Crucially, our qualitative analysis reveals a novel five-stage model of cultural integration. This model charts the user’s journey from peripheral observation to confident participation, detailing the AI’s evolving role from “expert guide” to “creative collaborator.” Our findings illuminate the dynamics of agency and trust, offering a framework for designing AI as a catalyst for community integration
01. TacChat: 基于触觉图像的视障群体无障碍共创共享
TacChat: Exploring User Generation and Accessible Sharing via Tactile Graphics for the Blind and Visually Impaired
作者:章越闻,李丹宁,周可心,江璞,吕京阳,Kotaro Hara,陈保水,高帅,焦阳*
关键词:
触觉图像,视障人群,可刷新触觉显示屏(RTD),无障碍,社交分享
尽管可刷新显示屏上的触觉图形已被证明能有效帮助盲人和低视力人士(BLV)获取和理解图文内容,但鲜有研究关注他们成为触觉内容创作者的需求。为了探索视障群体中基于触觉的内容创作与社交分享的可能性,我们提出了TacChat这一技术原型,旨在赋能BLV人群进行触觉内容的创作与分享。我们针对15名视障参与者开展了一项用户研究,旨在验证TacChat的辅助价值,并进一步探究他们对基于触觉的社交体验的偏好、动机及愿景。研究结果表明,TacChat显著提升了信息交流的效率,并改善了社交分享的体验。进一步的讨论表明,视障人士不仅希望且能够摆脱被动消费者的角色,积极主动地表达自我,甚至能够对视障群体内的社交体验产生积极影响。
02. 当机器人变得温柔:面向老年照护的社交机器人触觉界面共同设计
When Robots Feel Gentle: Co-Designing Tactile Interfaces for Social Robots in Older Adult Care
作者:张睿,肖晨茜,韦苏航,李致宏,Yun Suen Pai,焦阳*
关键词:
社交机器人,老年人,福祉,触觉交互,形变界面
随着社交机器人逐渐进入老年照护与陪伴场景,柔性形变界面在实现安全且富有情感性的触觉交互方面展现出独特潜力。然而,现有研究多聚焦于材料工程实现,对面向老年人福祉需求的设计探索仍显不足。为此,我们提出了一套用于早期概念探索的共同设计材料,包括分阶段工作流程、48张设计卡片和统一的机器人形态板。通过4场工作坊,12位具有多学科背景的参与者以家庭照护者及代理角色参与设计,最终产出18个概念方案,并归纳出一个涵盖功能辅助、生理调节、情感陪伴和触觉玩乐四个类别的设计空间。基于此,研究进一步提出一种克制、平稳的触觉交互范式,为面向老年照护的福祉导向型形变社交机器人设计提供参考。
03. Kairotask:探究模糊意图与时空情境的交互衔接
Kairotask: Probing the Bridge Between Vague Intents and Spatiotemporal Contexts
作者:杜佳琛,张元昊,金恒宇,邹昕恺,朱钧蔚,付心仪*
关键词:
任务管理,情境感知计算,人工智能交互,前瞻记忆
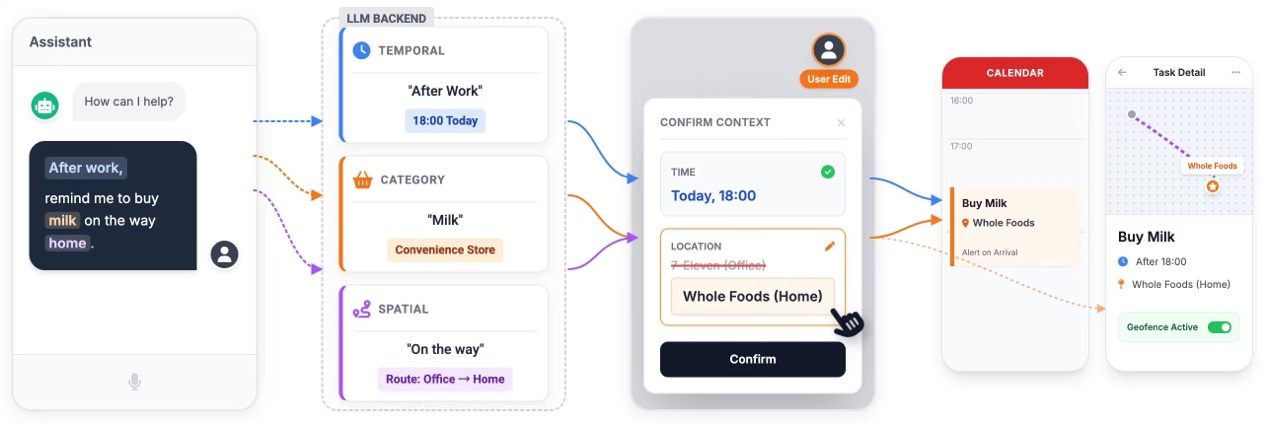
本文开展Kairotask 系统的移动端探针原型研究,旨在通过大语言模型(LLM)连接用户模糊的执行意图与具体的时空背景之间的断层。针对用户常因记录“稍后处理”等缺乏精确触发条件的意图而导致任务积压的问题,Kairotask 主动推断并补全任务所需的地理围栏和时间窗口元数据 。该系统通过“推理-确认”循环引入良性摩擦,利用人类认知中的生成效应,让用户在简单的交互确认中强化记忆编码,起到认知支架的作用 。实证研究表明,Kairotask 显著提升了弱计划型用户的任务执行效率,同时为未来个人信息管理中 AI 的自适应设计提供了关键洞察。
This work presents a mobile probe study of the Kairotask system, which leverages Large Language Models (LLMs) to bridge the disconnect between users' vague intents and specific spatiotemporal contexts. To address the issue of task backlogs caused by recording intents without precise trigger conditions (e.g., 'do this later'), Kairotask proactively infers and autocompletes the necessary geofence and time window metadata. By introducing 'benign friction' through an inference-confirmation loop, the system utilizes the Generation Effect in human cognition; this allows users to reinforce task memory encoding through simple interactive confirmations, effectively serving as cognitive scaffolding. An empirical study demonstrates that Kairotask significantly enhances the task execution efficiency of 'weak planners,' while providing key insights into the adaptive design of AI in future Personal Information Management (PIM).
04. 以张力进行设计——重构智能家居生态系统的用户体验
Designing with Tensions: Reframing Smart Home Ecosystem UX through In-the-Wild Evidence
作者:何爽,刘月雁,王子璇,薛潇,张旭,石磊,付心仪*
关键词:
智能家居系统,用户体验,设计张力,交互设计
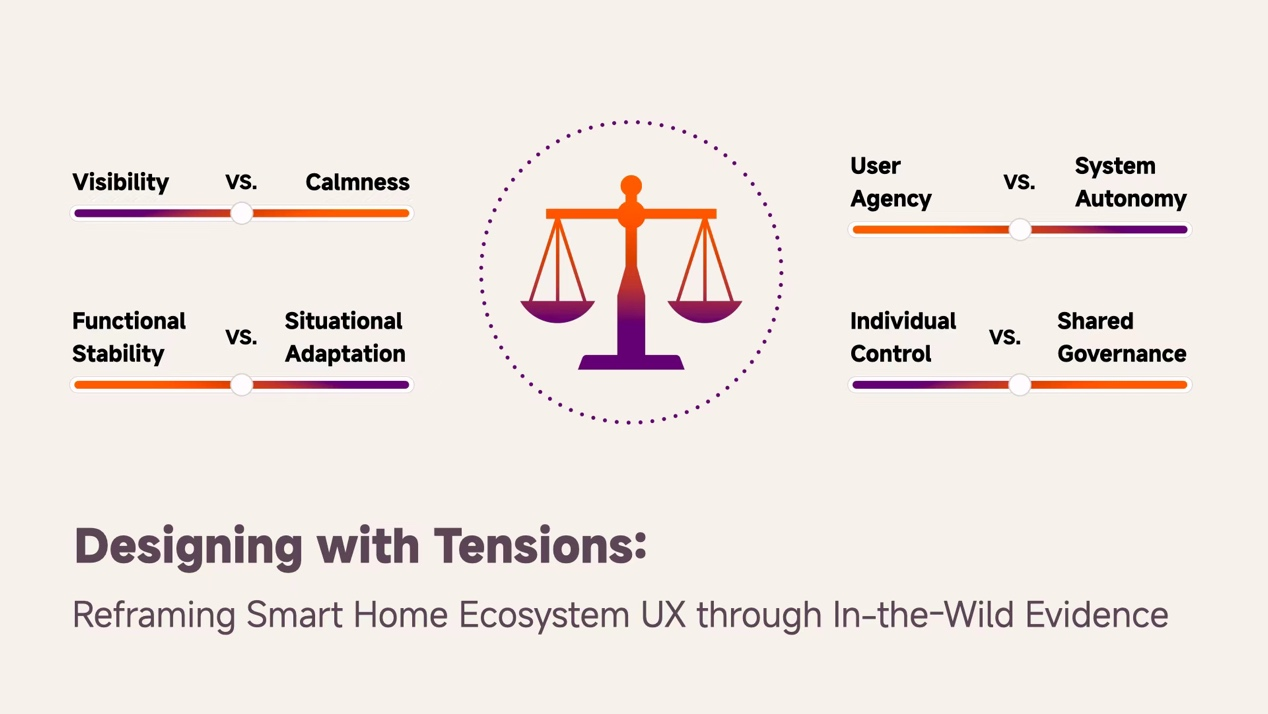
在人机交互(HCI)领域,智能家居生态系统(SHE)被视为受日常使用塑造的复杂社会技术系统。尽管已有大量野外实证研究揭示了关于用户的价值观和与系统互动行为的洞察,但如何将这些分散的定性见解转化为可操作的设计推理,仍存在明显的“中层知识”断层。为弥合这一鸿沟,本研究对过去20年间的 25 篇智能家居定性研究进行了定性证据合成(Qualitative Evidence Synthesis)。通过对原始引文和观察记录进行归纳式编码与聚类,研究团队识别出 13 个 UX 因子集群,并最终构建了四个核心的用户体验张力轴:
1.可见性与宁静感:系统状态的透明呈现与后台运行、减少干扰之间的权衡。
2.功能稳定性与情境适应性:规则的可预测性与应对生活动态灵活性之间的取舍。
3.用户能动性与系统自主性:用户作为行动主体与机器独立决策之间的矛盾。
4.个人控制与共同治理:个人控制权与家庭成员间集体协商、权力平衡的冲突。
研究通过一个具体的家庭自动化优先级的实际案例,演示了如何利用这些张力轴作为分析工具,引导设计者在相互冲突的目标间进行深层的权衡取舍。本研究将 UX 张力定义为一种设计资源而非待解决的故障,为在复杂社会技术环境下构建更有意义的智能家居体验提供了新的逻辑框架。
Recent HCI research describes smart home ecosystems as sociotechnical systems shaped by everyday use. However, despite numerous in-the-wild studies revealing how people use these systems, it remains unclear how to translate these insights into practical design reasoning. To address this gap, we conducted a qualitative evidence synthesis of 25 qualitative studies on smart home ecosystems, re-examining participants’ stories for experiential tensions that could inform the design process. We define four representative UX tensions: Visibility vs. Calmness, Functional Stability vs. Situational Adaptation, User Agency vs. System Autonomy, and Individual Control vs. Shared Governance. Using one real-world case from prior studies, we illustrate how these tensions support design reasoning by highlighting trade-offs. Our study presents UX tensions as design-oriented resources for navigating design trade-offs in smart home systems.
05. “不完美的同伴”:探究多元对话代理在支架式引导退休老人参与在线社区中的角色
The “Imperfect Peer”: Examining the Roles of Polyadic Conversational Agents in Scaffolding Retired Adults’ Participation in Online Communities

参与在线社区有助于增强退休老人的社会连接感。然而,这种参与往往依赖于细致的引导,且有时会受到自我评价焦虑的阻碍。本研究探讨了使用基于大语言模型的多元对话代理(Polyadic Conversational Agents, CAs)来支持社区参与的可能性。通过“绿野仙踪”实验,我们在真实园艺社区中部署了多元对话代理“小植”,并结合三个月的观察与 12 场深入访谈进行实证评估。结果显示,“小植”在社区中呈现了了从领域专家、群体吉祥物到社区成员的多重角色。它为用户参与提供了多维度的支架式引导:1)提供贴合语境的解释和提示,降低认知门槛;2)确保响应的即时性,缓解社交尴尬;3)引导观点,生成作品,激发自我表达。最后,我们讨论了设计多元对话代理的启示,包括人格化悖论、策略性脆弱性,以及私密与公共交流空间的平衡。
Participation in online communities fosters valuable social connectedness for retired adults. However, participation depends on careful facilitation and is sometimes hindered by self-evaluative concerns. In this study, we examine the use of polyadic conversational agents (CAs) - AI systems for multi-party interactions - to support community participation. Using a Wizard of Oz approach, we deployed Xiaozhi, a polyadic CA, into an online gardening community. We evaluated it through observations over three months and 12 semi-structured interviews. Our findings demonstrate diverse roles of Xiaozhi in the community, ranging from domain expert and group mascot to peer member. It provided multidimensional support for participation: 1) lowering cognitive barriers by offering context-aware explanations and prompts; 2) reducing social awkwardness by ensuring guaranteed responses; and 3) encouraging expressions by guiding users to crystallise their ideas. We discuss implications for designing polyadic CAs, including the anthropomorphism paradox, strategic vulnerability, and balancing one-on-one and one-to-many interactions.
06. “不只是工具,而是懂事的客人”:探索社交机器人在老年人社区中的情境边界
"Not Just a Tool, But a Sensible Guest": Exploring the Contextual Boundaries of Social Robots in Older Adults’ Communities
关键词:
老年人,社交机器人,参与式设计,社区空间
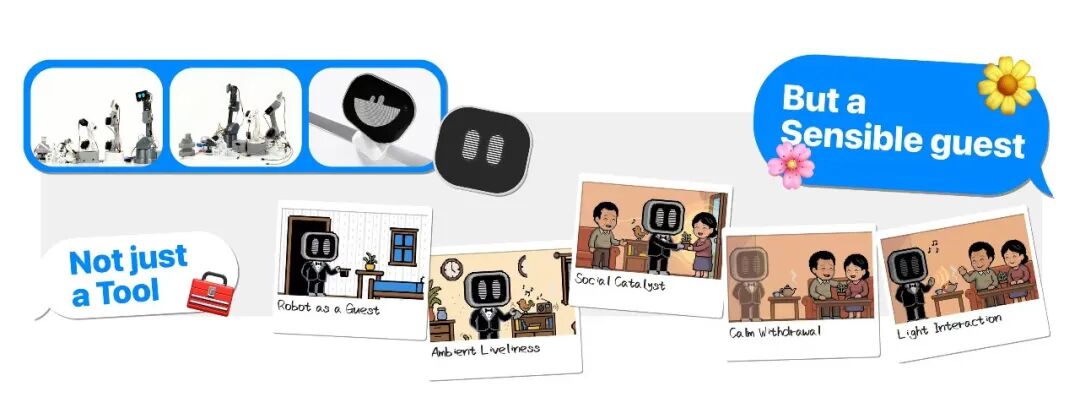
社交机器人日益被视为支持居家养老的重要载体。然而,现有研究大多聚焦于二元陪伴或功能性辅助,往往忽视了机器人在共享社区空间中如何把握复杂的情境边界——即何时介入、何时退出社交场景。我们与20位社区老年人开展了参与式设计工作坊,探究他们对社交机器人在公共情境中的认知与期待。研究发现,参与者对纯粹工具性机器人的功能冗余性持怀疑态度,认为其与现有工具相比并无显著优势;但与此同时,他们对环境活跃感表现出强烈渴望,期待机器人扮演社交催化剂的角色。参与者将机器人视为需要协商其在场方式的社会行动者,而非单纯的工具。基于此,我们以"机器人作为客人"为设计隐喻,提出相应设计启示,使机器人能够识别情境边界,在尊重老年人自主性的同时缓解社会孤立。
Social robots are increasingly recognized as promising agents to sup- port aging-in-place. However, existing research primarily focuses on dyadic companionship or functional assistance, often overlook- ing how robots should navigate the complex contextual boundaries within shared community spaces—specifically, when to enter and when to exit social situations. We conducted a participatory design workshop with 20 community-dwelling older adults to explore their perceptions of social robots in a communal context. Our findings reveal that participants expressed skepticism regarding the func- tional redundancy of purely utilitarian robots compared to existing tools, yet demonstrated a strong desire for ambient liveliness and the robot’s role as a social catalyst. Participants perceived robots not merely as tools, but as social actors whose presence must be negotiated. We propose design implications based on the “Robot as a Guest” metaphor, enabling robots to recognize contextual bound- aries to respect older adults’ autonomy while mitigating social isolation.
Drawing with Space: Understanding Creative Practice in AI-Supported Projection Mapping
关键词:
投影映射,空间创作实践,生成式人工智能,人机协作,创意支持,
具身交互,公共展示,设计研究方法
投影映射作为一种将数字内容叠加到物理空间中的技术,正在逐渐演变为一种重要的空间创作媒介。随着生成式人工智能在图像与动画生成方面能力的提升,其已开始被整合进投影映射实践之中,拓展了视觉表达的可能性,并降低了内容创作的门槛。然而,目前对于 AI 参与投影映射后创作实践如何发生变化仍缺乏系统性的理解。本文提出了一种 AI 支持的投影映射工作流,将空间判断从传统数字界面中外化至真实物理环境,使创作者能够在真实场景中与 AI 协同进行创作。通过在多种真实环境中开展的形成性研究,本文分析了用户在创作过程中逐步建立空间认知的方式,包括身体移动、感知反馈以及与生成结果的交互。研究进一步总结了关键的交互行为模式,并提出了面向未来 AI 创作工具的设计启示,为理解空间创作、人机协作以及生成式 AI 在创意实践中的作用提供了新的视角。
08. ReFashionPal:探索AI嵌入教学视频以支持旧衣改造的设计机会
ReFashionPal: Exploring AI Assistant Embedded in How-to Videos to Support Garment Repurposing
旧衣改造是日常可持续实践的重要形式,但新手在依赖教学视频开展改造时,往往受限于步骤信息不足、材料与工具条件不匹配,以及操作失误后支持缺失等问题。针对这一挑战,本研究探索将 LLM 助手嵌入教学视频的设计机会。我们以 ReFashionPal 作为技术探针,邀请 14 位参与者完成改造任务,据此分析此类系统在支持旧衣改造中的潜力与局限。
09. 修正还是扭曲?创作者如何在生成式AI文化遗产创作中应对文化偏见
Fix or Fake? How Creators Negotiate Cultural Bias in Generative AI Heritage Creation
关键词:
生成式人工智能,文化偏见,人机共创,文化遗产
生成式人工智能正日益应用于文化遗产创作,但其生成结果往往呈现文化偏见,对创作者的判断与责任提出挑战。现有研究多从技术或伦理视角审视该问题,较少关注创作者在具体情境中的实践过程。
本研究基于一次敦煌主题的AIGC视频创作工作坊,通过过程观察与访谈,分析创作者在人机协同创作中如何识别、理解并应对AI生成内容中的文化偏见。
研究发现,AI偏见不仅表现为跨文化“西方化”,还体现在文化内部细节的缺失与结构性错误。面对这些问题,创作者需承担“事实校验者”的角色,在文化准确性、审美表达与创作效率之间进行权衡,并形成修正、妥协与回避等多种协商策略。研究进一步指出,AI文化偏见并非单纯的技术问题,而是在具体人机协作中被持续调节的实践现象,同时也加重了创作者的“隐形劳动”。基于此,AIGC系统应从生成导向转向支持创作者的文化判断。
How Does It Know? Characterizing Thinking Through Unconscious Pen Gestures
作者:王雪竹,陆瑶,姚郗文,韩奕帆,姚智皓,米海鹏
关键词:
无意识笔势,笔式交互,认知外化,手势交互,眼动动态
笔式交互研究通常将笔视为一种显式输入设备。然而,在开放式设计与推理过程中,人们常常会产生一些自发的笔势(比如涂鸦、悬停或停顿),这些行为并不直接服务于书写。我们将这类行为定义为无意识笔势:思考过程中自发产生的、非输入导向的笔动。
为此,我们搭建了一套多模态研究平台,结合自研笔套、基于视频的眼动记录以及同步视频录制,将笔势与视觉探索行为进行对齐分析。我们探索性的研究表明,这些笔势呈现出稳定的时间模式,且与视觉探索行为存在一致关联,同时在个人与协作场景下表现出一定差异。
研究发现揭示了笔使用中尚未被充分探索的认知信号,也为面向时序敏感的笔式交互设计指明了新方向。
11. 3D打印作为材料探针:支持手工造纸工艺中的纤维理解
3D Printing as Material Probe: Supporting Fiber Understanding in Papermaking Craft
作者:刘贝托,姚智皓,陆瑶,王雪竹,姚郗文,米海鹏
关键词:
3D打印,材料探针,手工造纸,纸张水印,传统工艺,纤维理解,隐性知识,数字制造
传统工艺往往依赖难以直接言说、传授和迭代的隐性材料知识。在手工造纸中,水印设计尤其依赖对纤维状态、排水过程和纸张厚度变化的细致理解,而这些经验通常需要通过长期实践逐步积累。本文提出了一种以材料为中心的制作工作流,将3D打印作为一种“材料探针”,用于将原本隐性的工艺知识外化出来。研究通过使用3D打印模具作为对纤维行为的可交互假设,使工匠能够系统地探索、观察和讨论材料属性如何影响最终成品。通过在传统纸坊中的实地部署,研究展示了点状、线状和面状探针如何帮助工匠看见、比较并交流过去主要依赖经验感知的纤维行为。本研究将数字制造重新定位为一种支持认知与材料交互的工具,而不仅仅是自动化手段,并为传统工艺中的材料理解增强提供了一种可迁移的方法。
12. EmoFriends: A Modular Toolkit for Prototyping Customizable Emotion-Aware Companions
作者:Le Fang, Jiajuan Li, Meichen Liu, Wei Gong, Mingyuan Zhang, Ching Kwan Gordon Wah, Bo Chai, Yingqing Xu, Stephen Jia Wang*
关键词:
Companion Robot, Modular Toolkit, Affective Computing, Large Language Model
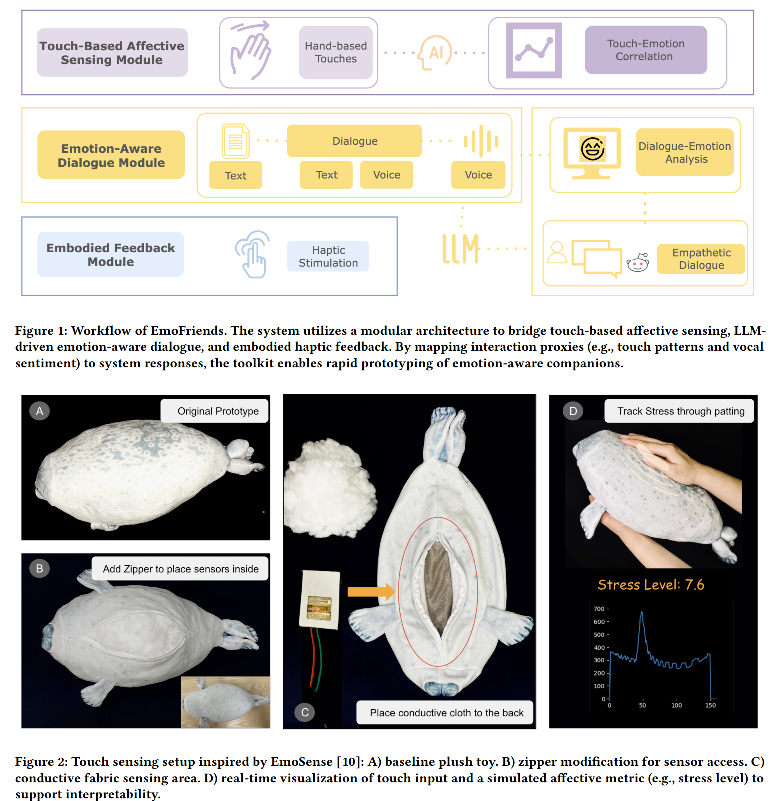
This work presents EmoFriends, a modular prototyping toolkit designed to lower the barrier for creating customizable, emotion-aware companions from familiar physical artifacts. The toolkit integrates three interchangeable modules: (1) a touch-based sensing unit for capturing affective interaction proxies, (2) an LLM-powered engine for empathetic dialogue, and (3) an embodied feedback module providing haptic and visual cues. By modularizing these components, EmoFriends supports the rapid exploration of diverse companion configurations and foregrounds technological transparency as a design resource for embodied AI. We evaluate the system through technical feasibility metrics (e.g., actuation latency and classification robustness) and an exploratory “first-contact” deployment at a public exhibition (𝑁 = 45). Our findings demonstrate the toolkit’s functional reliability in high-traffic settings and reveal a strong user valuation of customization. However, the study also highlights critical social tensions regarding sensing credibility, privacy, and the social appropriateness of toy-like form factors. We conclude by outlining how modular frameworks can advance the design and research of future embodied affective companions
